8月6日,空天科学与工程学院博士生研究生林梦婷在2022年国际制导、导航与控制学术会议上发表的论文“Distributed Stochastic MPC for Formation of Multi-agent Systems”荣获“优秀张贴论文奖”,这是我校首次在该会议获奖。
国际制导、导航与控制学术会议(ICGNC)是目前中国最大的航空、航天、航海、陆地等运动体制导、导航与控制(GNC)领域的国际学术会议,旨在集聚国内外高等院校、科研院所和工业部门的专家学者,探讨和交流GNC领域前沿学术和技术问题。会议由中国航空学会制导、导航与控制分会主办,每两年举办一次,目前已成功举办9届。本届会议于2022年8月5日至7日在哈尔滨举行,邀请了GNC领域的国际知名学者做大会特邀报告,设有总师论坛、青年科学家论坛、国家级教学名师论坛等,共收到来自6个国家和地区的1000余篇论文。优秀论文奖旨在鼓励更多学生和中青年科学工作者投身于制导、导航与控制的前沿性学术研究和关键性技术创新。本次优秀张贴论文奖英文论文共提名8人,经过现场答辩和专家评审,最终5人获奖,其他4位获奖者分别来自中航618所、哈工大、北航和南航等航空航天领域内传统优势企业和高校。
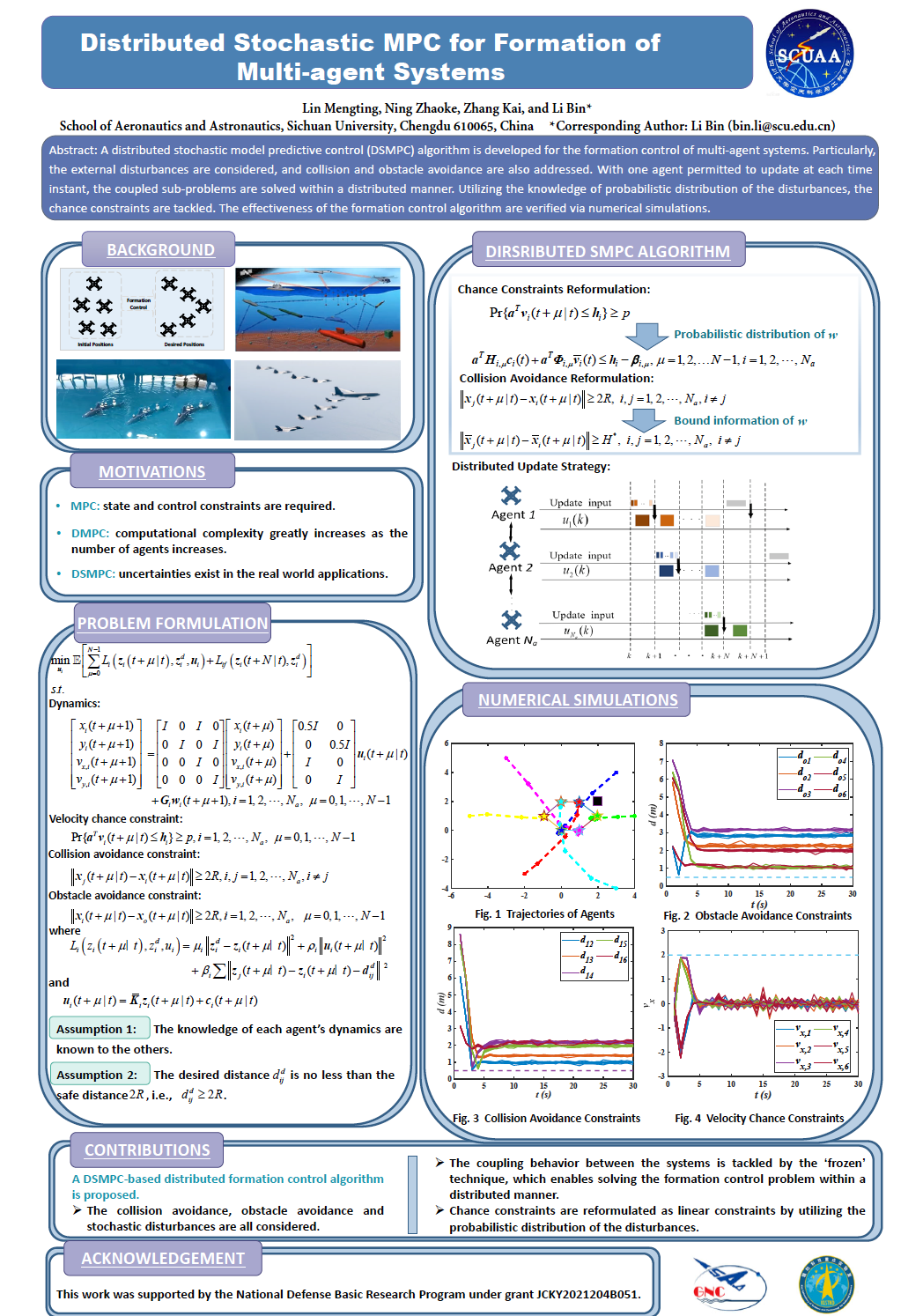
获奖论文在李彬教授、宁召柯副研究员、张凯副研究员的共同指导下,由博士研究生林梦婷撰写完成,论文所有作者均来自空天科学与工程学院“智能空天无人系统”团队。该论文针对带有扰动的二阶线性多智能体系统编队问题,提出了一种基于分布式随机模型预测控制(DSMPC)的编队避障算法,有效解决了复杂环境下的无人机/无人车的编队和避障问题。