近日,我院蒲伟教授团队在软体机器人抓取和操纵方面取得重要研究进展,相关成果“Bioinspired Soft Robotic Fingers with Sequential Motion Based on Tendon-Driven Mechanisms”发表在机器人领域国际权威期刊Soft Robotics(2020年IF=6.16(2/28),中科院&JCR 一区TOP期刊)上。四川大学空天学院2020级博士研究生张印为论文第一作者,蒲伟教授为论文通讯作者,四川大学空天科学与工程学院为唯一通讯单位。
软体驱动器和软体机器人技术是机器人领域的前沿研究方向,相比于传统刚性机器人在交互安全性和环境适应性方面展现了前所未有的优势,近年来世界各地的研究者开展了广泛的研究。目前多数软体驱动器在外刺激(流体压力、磁场、热、电场)作用下呈现连续的运动和变形,这些软体驱动器构成的软体机器人抓手难以在手指的整个包络范围内形成良好的贴合一致性,仅靠局部软材料变形形成的贴合面难以实现稳定的抓取和操纵。
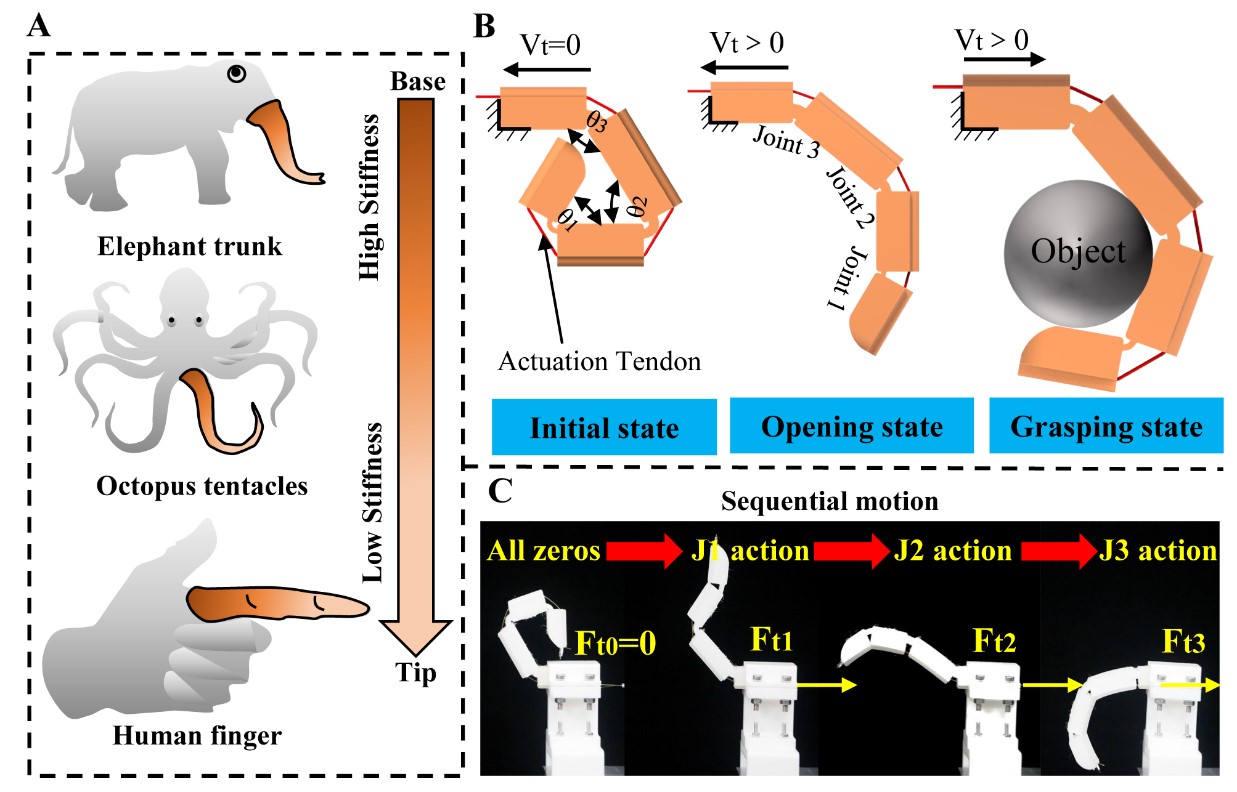
为了解决这一问题,蒲伟教授团队受人类手指运动机制的启发,创新性提出了一种肌腱驱动的软机器人手指运动方法和策略,通过预编程手指弯曲构型和关节的刚度梯度,实现了软体机器人手指模拟人类手指的顺序运动,利用三维增材制造技术(3D打印)制造了软体手指物理原型,并研发了一种两指软体机器人抓手。
图1. 软体手指顺序运动机制和软体机器人抓手抓取策略
该团队通过拉伸试验研究了 3D 打印填充方向引起的各向异性对力学性能的影响,建立了运动学、刚度和指尖轨迹模型,分析了横截面特征对手指关节变形能力、承载能力和使用寿命的影响。此外,在自建的实验平台上进行了多项实验,以评估刚度梯度引起的顺序运动的优势。研究结果表明,具有顺序运动的软体机器人手指在具有各种曲率的物体表面上表现出出色的贴合一致性,并且在更大的包络范围内优于非顺序运动手指。在不改变指尖运动轨迹的情况下,仅通过调整关节的刚度就可以调整手指的变形和承载性能。基于所提出的软体手指运动策略,研发的两指抓手安装于七自由度机械臂上,验证了顺序运动机器人抓手在实际应用中抓取不同形状和质量物体的优越能力。该研究对软体驱动器和软体机器人的研究提供了新的启发和思路。
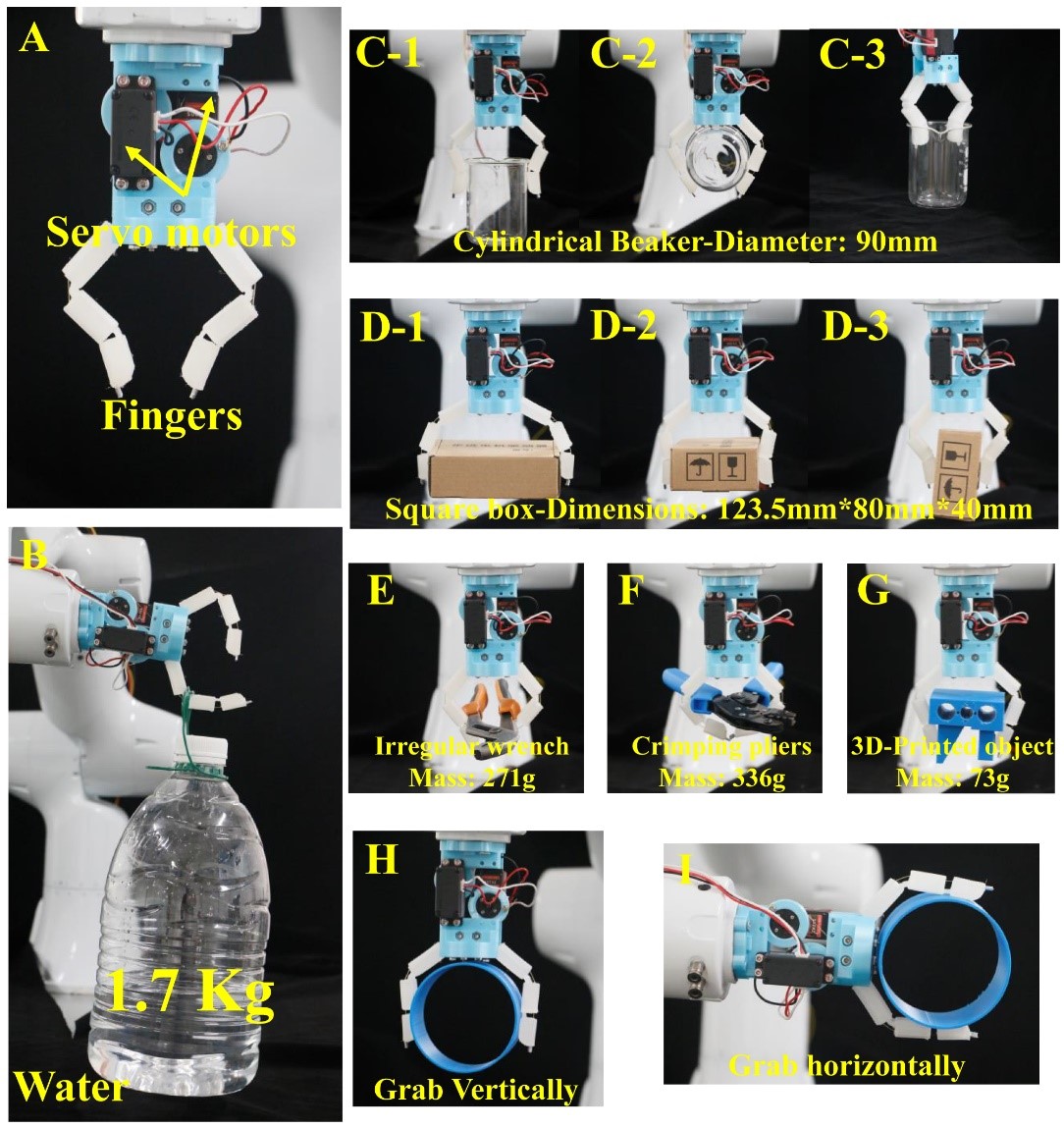
图2. 两指软体抓手的应用验证